
Environnement du projet
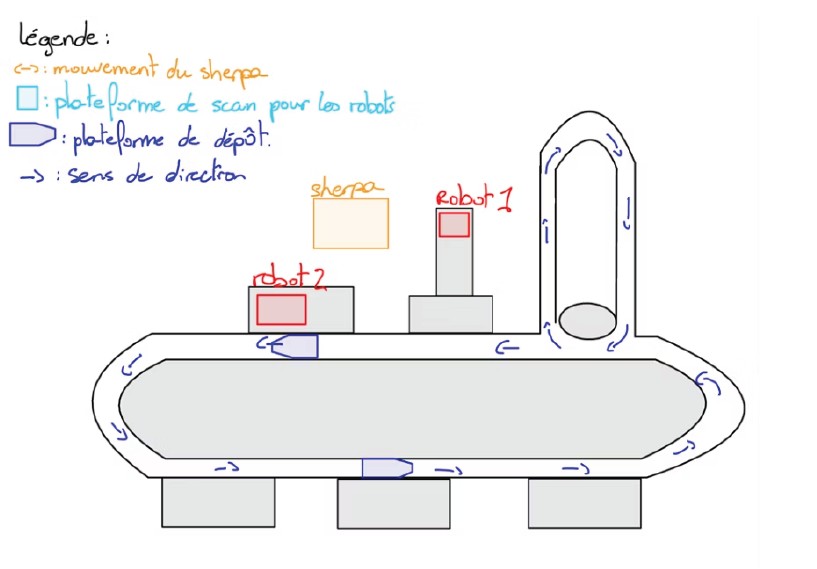
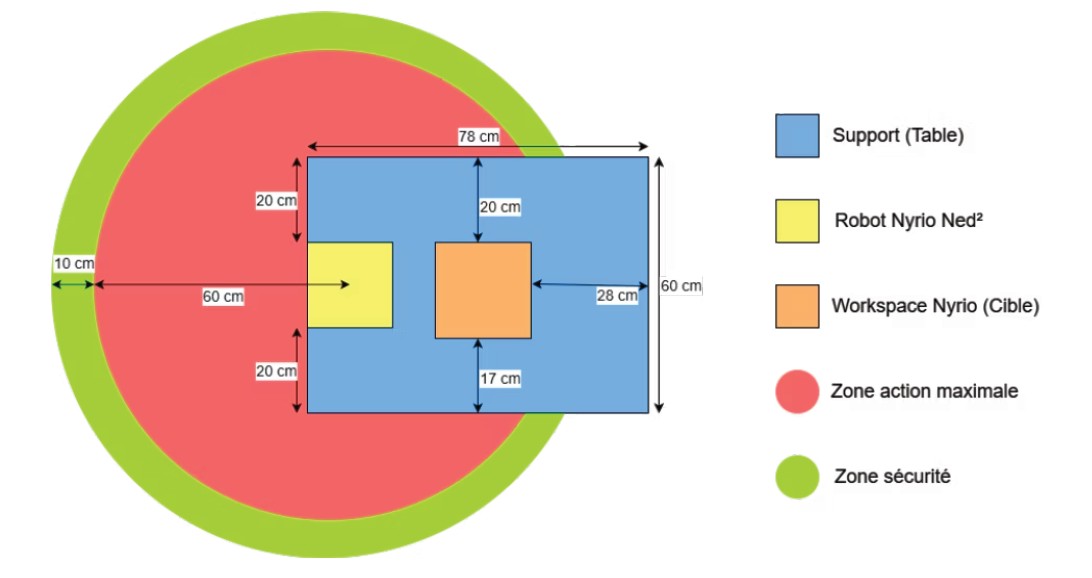
L’environnement se distingue en deux parties. La première partie correspond à la table qui sert de magasin. Cet environnement est fixe et nous retrouverons le robot ainsi que la cible Niryo. Nous retrouverons à côté un robot Sherpa transportant une autre cible Niryo afin que le robot Ned2 puisse déposer les pièces du magasin sur l’autre plateforme. Voici un schéma représentatif avec les différentes mesures utiles : Pour se repérer dans la salle, nous avons également établi un schéma représentant l’ensemble des machines et leur position dans le projet :
Cahier des Charges
Un cahier des charges est un document fixant les modalités d’exécution d’un projet.
Ce projet de SAE vise à concevoir une chaîne automatisée complète pour la JPO de l'école qui aura lieu début Février. Il s'agit d'un défi technique collaboratif
impliquant plusieurs systèmes : robot industriel (UR3), 2 robots Niryo Ned 2, un robot mobile (Sherpa) et robot humanoïdes (Pepper). La mission de notre binôme
repose sur la programmation d'un robot Niryo Ned 2 afin d'assurer son rôle au coeur de ce processus industriel.
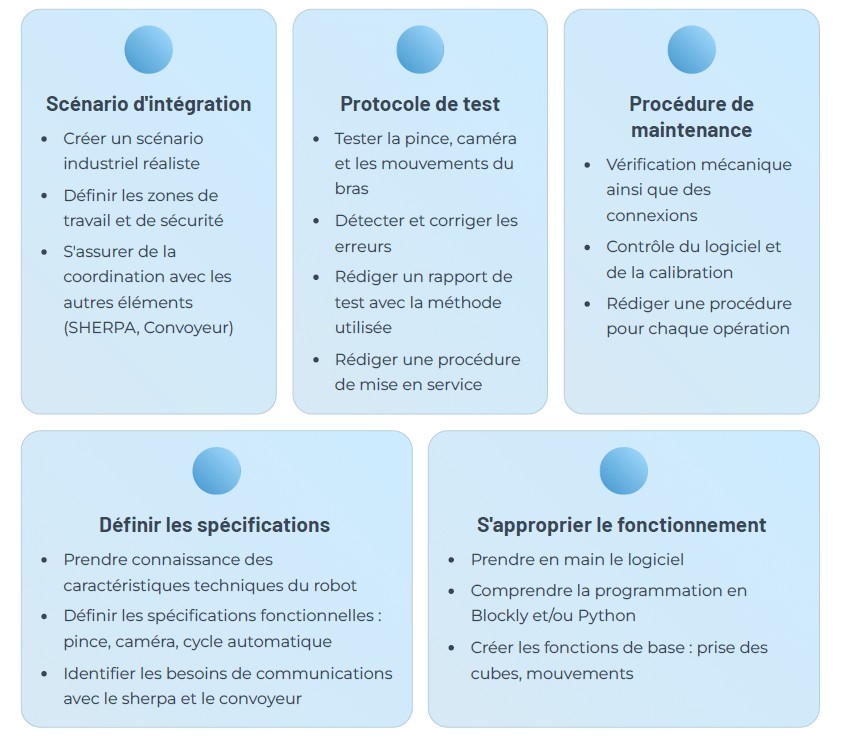
Nos objectifs sont donc les suivants : Touver un scénario d'intégration réaliste du robot dans la chaîne de production, concevoir un protocole de tests ainsi
qu'une procédure de maintenance, définir les spécifications et s'approprier le fonctionnemment.
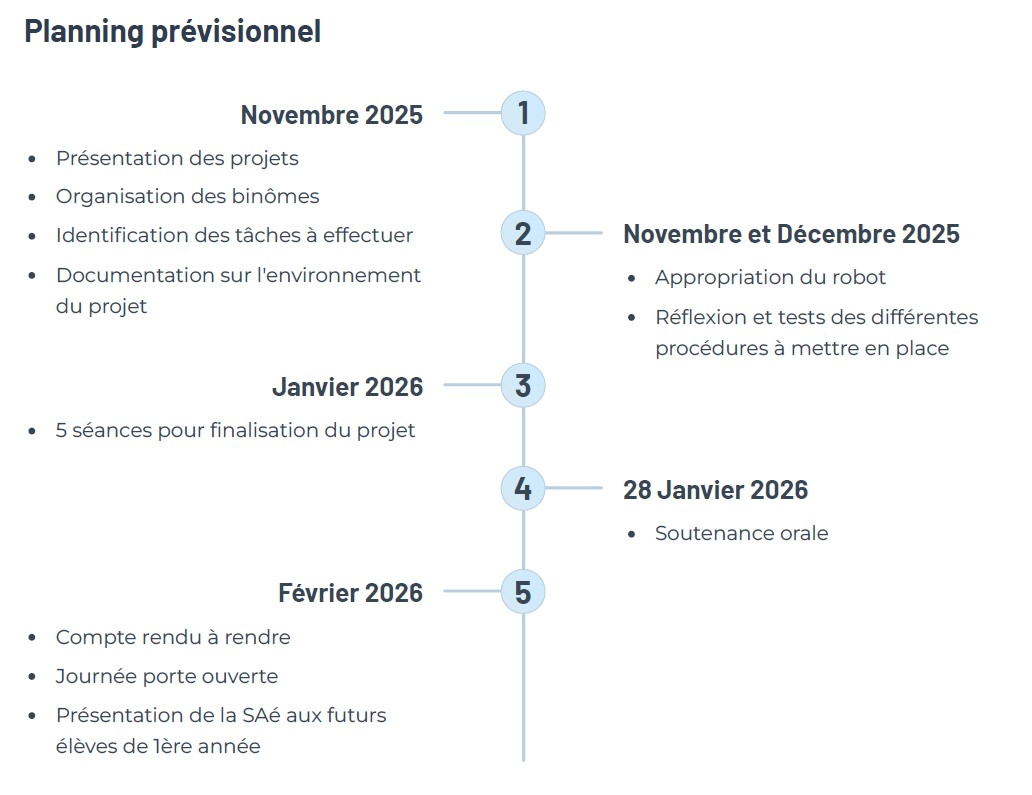
Vus trouverez ci-contre une photo des objectifs plus détaillés ainsi que le planning prévisionnel du projet.

Analyse fonctionnelle
Dans le cadre de cette SAE, le robot Niryo Ned 2 agit comme un bras de manipulation de fin de ligne. L'ordre 1 montre que le robot assure la transition entre le
bras du convoyeur et le robot mobile SHERPA. Le robot doit non seulement manipuler les objets avec précision, mais aussi synchroniser son mouvement avec l'arrivée
du SHERPA. Comme cette fonction n'est pas directement réalisable il faut donc l'a découpé.
La mission globale se décompose en trois étapes logiques qui structurent le système :
F1 - Détection : Le cycle démarre par la détection du cube sur le convoyeur (via caméra). Cette étape assure la synchronisation entre le flux de production et
le mouvement du robot.
F2 - Saisie : Le Niryo Ned 2 exécute sa trajectoire vers les coordonnées cibles et active sa pince. C'est la phase de manipulation physique.
F3 - Dépose : Le robot dépose les cubes sur le SHERPA. Cette étape valide la fin du cycle et déclenche le signal autorisant le départ du robot mobile pour sa
mission.
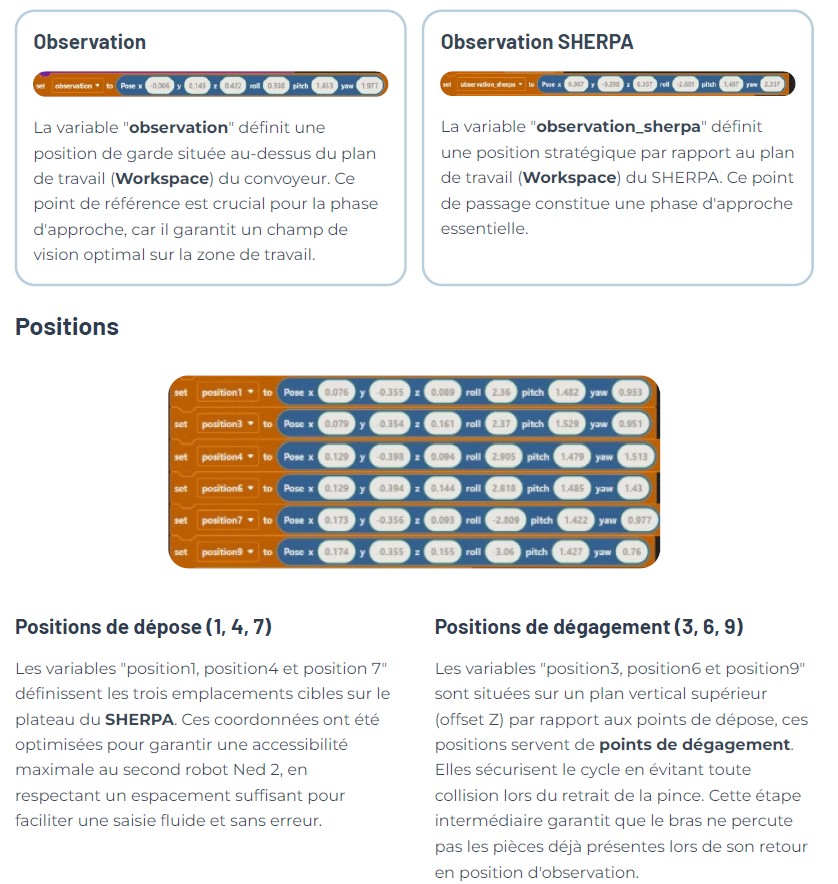
Conception
La phase de conception a débuté par la modélisation de l'environnement de travail (consultable dans la section "Environnement du projet") Après avoir validé le schéma de conception et défini le scénario industriel, nous avons procédé à la configuration des deux Workspaces (zones de travail) : celui embarqué sur le SHERPA et celui assurant l'interface entre le Ned 2 et le convoyeur. Une fois ces environnements définis, nous avons cartographié l'ensemble des coordonnées nécessaires au cycle de fonctionnement. Pour optimiser la clarté et la maintenance du code, j'ai eu l'idée de clarifier le programme avec de variables de position nommées, permettant d'associer chaque coordonnée cartésienne à un alias explicite. Vous trouverez ci-contre des photos justifiant et expliquant la pertinence de choix réalisés lors de la programmation du robot.
Conclusion
En prévision de la présentation lors de la JPO, la salle a été sécurisée afin de garantir l'intégrité physique du public et le bon fonctionnement des machines.
Un périmètre de sécurité a été instauré, délimitant la zone de navigation du SHERPA et l'enveloppe de travail des robots Ned 2.
Sur le plan de la maintenance et du maintien en condition opérationnelle, une procédurerigoureuse a été établie :
Initialisation: Calibration systématique du robot lors de la mise sous tension.
Calibration mécanique : Vérification et recalage des Workspace si un déplacement physique de base est constaté.
Maintenance logicielle : Suivi des mises à jour du firmware et redémarrage préventif des moteurs pour garantir la précision des encodeurs.
En conclusion, malgré les défis rencontrés, notamment l'absence d'un automate de supervision centralisé, nous avons su développer des solutions logicielles
et nous adapter pour le bon fonctionnement de la chaîne. L'intégration du robot Nyrio Ned2 est une réussite.
Ce projet valide la capacité de systèmes collaboratifs à opérer de manière synchronisée dans un environnement de production simulé.